我院大学生创新训练计划项目执行进度要求,决定对2023年12月已到期的大学生创新训练计划项目进行结题验收,现通知如下。
一、验收项目范围
接学校通知,截止2023年12月到期的校级大学生创新训练计划项目和自治区级(本次学院没有到期项目)大学生创新训练计划项目如下:
序号 | 项目编号 | 项目名称 | 负责人 |
1 | dxscx2022379 | 木质素纳米粒子修饰的3DGBM的构建及性能研究 | 罗文博 |
2 | dxscx2022386 | CNC增强PVA基的纳米银膜制备及其配方优化研究 | 热吾扎·哈尔甫别克 |
3 | dxscx2022387 | 低共熔溶剂中木质素的选择性解聚及防止其再缩合的研究 | 杨豪 |
4 | dxscx2023461 | 生物质炭包膜缓控释肥制备及其控释性能研究 | 熊钰彤 |
5 | dxscx2023462 | 几个噻吩吡喃酮化合物的合成研究 | 于怡豪 |
6 | dxscx2023463 | 纤维素基锌金属配合物光电材料的合成及性能研究 | 徐曾林 |
7 | dxscx2023464 | 苯并吡喃酮类化合物的衍生化和抗病原真菌活性研究 | 闫思昌 |
8 | dxscx2023465 | 含席夫碱类铜离子荧光探针的合成与性能研究 | 周敏 |
9 | dxscx2023466 | “一锅法”制备ZnO/活性炭及其光催化性质 | 唐阳欣 |
10 | dxscx2023467 | 棉花加工废弃物中棉籽糖提取及纯化研究 | 靳亚平 |
11 | dxscx2023468 | 四溴双酚S在含盐水相中的光降解研究 | 刘秀燕 |
12 | dxscx2023469 | 棉杆基生物炭的制备方法及其对土壤污染物吸附性能研究 | 倪宇航 |
13 | dxscx2023470 | 多孔Ni基催化剂的制备及其木质素加氢性能研究 | 王兆军 |
14 | dxscx2023471 | 玫瑰花渣多糖的分离分析及抗氧化活性研究 | 玛日古丽·尼牙孜 |
15 | dxscx2023472 | 谷氨酸发酵尾液中无机盐种类鉴定方法研究 | 闫定玮 |
16 | dxscx2023474 | 大青叶多糖的结构改性及抗氧化活性研究 | 孟苇特 |
17 | dxscx2023475 | 几种异香豆素化合物的合成研究 | 徐帆 |
18 | dxscx2023476 | 基于吡啶环与锌配合物的合成、结构及光电性能研究 | 谷兆龙 |
序号 | 项目编号 | 项目名称 | 负责人 |
19 | dxscx2023477 | 谷氨酸发酵尾液中硫酸铵含量的测定方法研究 | 何菊 |
20 | dxscx2023478 | 生物质基多孔碳材料的制备及其电化学性能研究 | 王敏 |
21 | dxscx2023479 | 果胶醛-壳聚糖水凝胶药物缓释系统制备及性能 | 熊小踴 |
22 | dxscx2023480 | 双酚F在水环境中光降解研究 | 宋梦雨 |
23 | dxscx2023481 | 聚集诱导型三苯甲基类有机自由基的合成与性能研究 | 谢志识 |
24 | dxscx2023482 | 生物质炭复合材料的制备及其电化学性能研究 | 谭自成 |
25 | dxscx2023483 | 棉籽加工废弃物棉籽糖蜜中提取棉子糖研究 | 刘林康杰 |
26 | dxscx2023484 | 关于香豆素衍生物的合成及活性研究 | 阿尔娜·木拉提汉 |
27 | dxscx2023485 | 红枣多糖的制备、结构表征及生物活性研究 | 薛地 |
28 | dxscx2023486 | 枸杞子多糖分离,结构修饰及生物活性研究 | 依提·库地来提 |
29 | dxscx2023487 | 氯化胆碱低共熔溶剂脱除棉花秸秆木质素的研究 | 陈智 |
30 | dxscx2023488 | 新型偶氮苯类材料的合成及其光致变色性能研究 | 高欢 |
31 | dxscx2023489 | 新型侧链取代三苯甲基发光自由基的性能研究 | 阿依江·阿达力汗 |
验收方式
(一)大创验收答辩评委小组
组 长:陈燕勤
督 导:潘乐
成 员:王欢欢、丁焘、张欣茜、刘存
联络员:谭瑞康
(二)验收安排
验收时间:2023年12月25日15:30开始
验收地点:化学化工学院会议室
验收要求:学生答辩5分钟,评委提问3分钟;验收采用PPT答辩形式,应按申请时的成果形式要求进行验收,在验收中需要审核期刊原文或录用通知,对不符合申请书成果要求的项目不予验收通过。
三、验收材料
请按学校要求材料装订好后交至教学办,其中含以下材料:
1.大学生创新训练计划项目验收总结报告(含项目总结报告:需填写评委意见;项目成果展示:格式见参考模板;公开发表的论文:期刊网下载的电子版和原Word文字版各一份)
2.答辩用WPS演示文件:电子版一份;
3.所有验收材料均需纸质版打印装订,统一蓝色封皮。注意填写评委意见。
电子版和纸质版材料提交截止时间:2023年12月27日上午13:00之前
联系人:谭瑞康 电话:8762311
化学化工学院教学办
2023年12月19日
附件1:大学生创新项目验收材料参考模板(装订时,此行请删除)

校级大学生创新创业训练
计划项目验收材料
项目名称:
项目类型:
R创新训练 £创业训练 □创业实践
项目级别:
£国家级£自治区级 □校级
项目负责人:
联系电话:
团队成员:
立项时间:
结项时间:
指导教师:
姓名: 电话:
项目单位:
单位名称(此处须加盖学院公章)
报送日期:
新疆农业大学 教务处制
二〇二三
目 录
1.大创项目申报书
(尾页含同意立项意见及公章)
2.大创项目验收表
(项目基本信息、简述、评审意见等)
3.大创项目总结报告
(层次重点清晰,按照论文格式排版)
4.大创项目成果展示
(按模板凝练,一张A4纸即可)
5.论文录用通知函
(录用后由杂志社出具)
6.论文见刊详情
(下载刊发后的论文)
7.其它附件自拟即可
校级大学生创新创业训练
计划项目申请书(扫描原件)
项目名称:
项目类型:
R创新训练 £创业训练 □创业实践
项目级别:
£国家级£自治区级 □校级
项目负责人:
联系电话:
团队成员:
立项时间:
结项时间:
指导教师:
姓名: 电话:
项目单位:
单位名称
新疆农业大学 教务处制
二〇二三年版
填 写 说 明
一、本表要按顺序逐项填写,内容要实事求是,表达要明确、严谨。空缺项要填“无”。要求一律用A4纸双面打印,于左侧装订成册。
二、申请项目团队人数不得超过5人(1人为项目负责人,参与合作研究者2-4人),运行周期为1-1.5年,运行期应是学生在校期间。
一、项目申请人情况
项目 负责人 | 姓 名 | 学号 | 班级 | |||
项 目 组 成 员 | 姓 名 | 学号 | 班级 | 在项目组的分工 | ||
申请人参加科研的经历 | ||||||
起止年月 | 参加项目名称 | 项目来源 | 担任的工作 | |||
指导教师近五年主持或参与的科研项目(限填五项) | ||||||
起止年月 | 项目名称 | 项目来源 | 排名 | |||
二、申请人对研究项目简要说明
一、申请理由(包括前期工作基础及项目成员具备的知识、兴趣、已取得的成绩等) |
二、选题依据 (包括项目的学术价值、应用价值、国内外研究现状分析,并列出主要参考文献)(2000-4000字) |
三、研究方案(包括研究目标、研究内容、研究方法、实验方案和技术路线、可行性分析等) 研究目标: 研究内容: 实验方案: 可行性分析: |
四、项目的创新点、特色和拟解决的关键问题或技术 项目的创新点: 项目的特色: 拟解决的关键问题或技术: |
五、项目进度安排(查阅资料、选题、设计项目研究方案、开题报告、实验研究、数据统计、处理与分析、研制开发、撰写研究论文和总结报告和成果推广等) |
六、拟利用资源(科研教学设施、仪器设备、资料等) |
七、经费使用计划 | ||
序号 | 支出项目(理由) | 金额(元) |
1 | ||
2 | ||
3 | ||
4 | ||
5 | ||
6 | ||
7 | ||
合 计 | ||
八、项目预期成果(研究论文、专著、调研报告、专利、计算机软件、研制产品、纪实材料等) | ||
九、诚信承诺 本项目全体成员郑重承诺,该项目研究将遵守学校有关规定,恪守学术规范,不抄袭他人成果,不弄虚作假,先诚实做人,再诚信做学问和研究,按项目研究进度和合同约定的内容保质保量完成各项研究任务。如有违规行为,愿承担一切责任,接受学校的处理。 项目组成员签名: 年 月 日 | ||
十、学院意见 院长签名: 学院盖章: 年 月 日 |
十一、学校意见: 学校盖章: 年 月 日 |
校级大学生创新创业训练
计划项目验收表
项目名称:
项目类型:
R创新训练 £创业训练 □创业实践
项目级别:
£国家级£自治区级 □校级
项目负责人:
联系电话:
团队成员:
立项时间:
结项时间:
指导教师:
姓名: 电话:
项目单位:
单位名称
新疆农业大学 教务处制
二〇二三年版
大学生创新创业训练计划项目验收信息表
项目名称
项目负责人
姓名
学号
班级
学院
指导教师
职称
项目组成员
姓名
学号
班级
学院
完成情况
( )1.达到预期指标 2.超过预期指标 3.未达到预期指标
成果形式及数量
1、£论文 ( )篇,其中已公开发表( )篇 ;
2、□实物 ( )件,名称: ;
3、□调研报告 ( )份 ;
4、□软件 ( )份 ;
5、□软件说明书 ( )份 ;
6、□电子展板: ( )份 ;
7、□其它:
研究项目简述
请按下列提纲编写,要求简明扼要凝练,实事求是。(1000字左右,可加页) 1.研究目标、起止时间、完成的主要内容 2.研究过程简介 3.主要研究成果总结 4.研究项目创新点与不足之处 5.发表论文情况(论文题目:刊物名称、时间、卷期; 著作:名称) 6.研究小组心得,存在问题,创新项目管理建议 7.经费支出情况(按实际支出列示,其与教务处拨付经费不挂钩) 注意排版格式整齐美观 | |||
验收专家组结论 | |||
成绩等级: □优秀 □良好 □通过 □不通过 专家组评价:(评价该项目选题意义、研究的严谨性、科学性、研究成果价值,对有突出特点的项目,请重点评价其特殊性和相对创新之处) 验收专家组组长签字: 教学单位签章: 年 月 日 | |||
专家组名单 | |||
序号 | 姓名 | 职称 | 本人签名 |
校级大学生创新创业训练
计划项目总结报告
项目名称:
项目类型:
R创新训练 £创业训练 □创业实践
项目级别:
£国家级£自治区级 □校级
项目负责人:
联系电话:
团队成员:
立项时间:
结项时间:
指导教师:
姓名: 电话:
项目单位:
单位名称
新疆农业大学 教务处制
二〇二三年版
目 录
基于Freescale单片机控制的双足竞步机器人的设计与制作
摘要:在科学技术飞速发展的今天,各类机器人已在工业生产、人们的日常生活中被广泛应用,各类机器人大赛也各具特色、异彩纷呈;本文作者设计了一款竞步机器人,该竞步机器人用3mm拉丝钢板做整体框架,并搭建外围电路嵌入Freescale单片机,通过CodeWarrior编程实现对硬件电路的控制,再通过单片机控制外围驱动电路,控制竞步机器人六路舵机角度的,最终实现前进、后退和翻跟头等基本动作,其稳定性、完成指定动作等指标均符合设计要求。
本篇报告仅供参考,格式和内容自拟,注意排版整齐美观,层次结构清晰,重点突出。
1.机器人相关研究国内外情况概述
1.1国际发展现状
现代机器人的研究始于20 世纪60年代, 最初为工业机器人。1969年Vukobratovic M 第一次介绍了双足行走, 这是类人机器人研究的基础。随着科学技术的发展, 机器人的领域也在不断拓宽, 逐渐由制造业向非制造业和服务行业发展。具有人类的外形特征, 可以模仿人类行为能力的仿人机器人早已经出现。
1999年美国麻省理工学院研制出了仿人形机器人COG,由头、躯干、胳膊及双手组成,它是人和人工智能等领域的一个平台。2005 年麻省理工学院研制出具有29 个自由度的机器人Domo。同年该学院还研发出双足学习机器人,采用“被动动力学( Passive-Dy namic) ”理论设计,部分关节没有电动机和控制器, 却能实现非常类人的运动。目前,国外研究类人机器人的有美国、日本、英国、韩国、法国、加拿大。美国研究机器人较早, 日本在类人机器人研究中成果最多, 位于前列。
国际上最早的机器人竞赛是发生在1988年,日本广播协会(ABURoboconD的前生)举办了首届机器人比赛。此后,机器人竞赛发展的规模不断壮大,项目不断完善,影响力不断增强。据不完全统计,截至目前,全球开展的机器人大赛的大型竞赛活动就达到几百项,并且已经引起了各国科学家、科研人员、学生和企业界认识的共同关注。
目前,国际上常见的机器人竞赛有以下三类:一、机器人足球竞赛,国际上最具影响的机器人足球赛主要是FIRA和RoboCup两大世界杯机器人足球赛;二、机器人灭火竞赛,机器人灭火比赛已成为全球最普及的智能机器人竞赛之一;三、机器人综合竞赛,机器人综合比赛主要包括国际机器人奥林匹克竞赛和FLL世锦赛。
1.2国内发展现状
我国机器人竞赛的起步比国际上稍晚几年。2001年5月,中国科学技术大学率先在校内举办了第一届大学生机器人跳舞比赛,从此拉开了我国机器人比赛活动的序幕。近年来,国内机器人竞赛发展迅速,比赛规则和项目也逐步与国际接轨。
国内参赛队伍大部分是学校选拔出来的优秀学生,或是当地少年宫参加机器人兴趣全国的比赛。参赛队伍有严格的人数限制,起组成一般是带队教师和参赛学生。在国外,除了以学校为单位组织的参赛队伍外,许多具有一定规模的机器人俱乐部也允许参加比赛。很多家长也会带领自己的孩子,以家庭或者社区为单位参加比赛。由此可见,国外竞赛的辐射面广,才赛队伍的来源更加广泛,反映了国内外社会对机器人价值认知的差异。
截至目前,我国的机器人大赛已初步形成多种多元化比赛形式,各种形式的比赛应有尽有,主要有Robotworks和Robotcup。就在过去不久的2016中国工程机器人大赛暨国际公开赛于5月26-29日在山东体育学院日照校区举行,本届中国工程机器人大赛暨国际公开赛由教育部高等学校创新方法教学指导委员会、中国自动化学会机器人竞赛工作委员会、中国人工智能学会认知系统与信息处理专业委员会、国际工程机器人联盟中国委员会主办,设本科院校组、职业院校组和青少年组3个组别,涉及搬运工程、双足竞步、仿人竞速、生物医学工程等30个大项62个小项,吸引力清华大学、英国曼彻斯特大学等来自国内外1261支队伍的5000名选手参赛,参赛学校、队伍及人数都为历年之最,经过三天的对决,本次大赛共决出一等奖128个,二等奖263个。
中国作为亚洲第三大的工业机器人需求国,市场发展稳定,汽车及其零部件制造仍然是工业机器人的主要应用领域,随着我国产业结构调整升级不断深入和国际制造业中心向中国的转移,我国的机器人市场会进一步加大,市场扩展的速度也会进一步提高。
2.研究主题
在当今社会快速发展的前提下,越来越多的学生队伍参与到机器人的研究与创新中,为了迎合当前的形式,我们以“中国机器人大赛暨国际公开赛”的参赛要求为目标,旨在设计制造出一种竞步机器人,该机器人能够满足在2017年江苏徐州举办的“中国机器人大赛暨国际公开赛”,该比赛对于竞步机器人的动作要求如下:
(1)在标准比赛赛道(1×6米)的起点立正,向前走五步;
(2)向前翻五个跟头;立正
(3)向后翻五个跟头;立正
(4)走向终点。
该比赛的成绩以最终以时间较短者获得胜利,若没有在规定赛道内到达终点,则根据距离终点距离的多少进行相应的扣分。为此,在好奇心的驱使下,便有了完成该项目的想法。
3.准备阶段
在做出了进一步的考虑与商议,最后决定设计并制造出两种竞步机器人,即狭窄足竞步机器人和交叉足竞步机器人。
3.1研究目标
(1)设计制造出一款双足机器人。以外围协处理器飞思卡尔模块为核心,完成机器人的硬件合理化布局与设计、以及软件设计,实现双足结构,并以双足直立行走方式移动;
(2)机器人由与脚底板相邻的舵机控制机器人的重心左右移动来实现前进,与脚底板相连的舵机平放在脚底板上,舵机的扭力输出轴与前进方向平行。
3.2研究方案
设计的竟步机器人主要由机械结构和控制系统组成,机械结构是机器人的“骨架”,控制系统就被认为是机器人的“大脑”,所以机器人的先进程度与功能强弱通常都直接与其控制系统的性能密切相关。机器人控制系统是根据指令及传感信息控制机器人完成一定的动作或作业任务的装置,它是机器人的心脏,决定了机器人性能的优劣。作为机器人的核心部分,机器人控制系统是影响机器人性能的关键部分之一,它从一定程度上影响着机器人的发展。
设计并制作一种能够完成指定动作的竟步机器人。可以根据预先设计的动作,以及定制的指令程序完成一系列高难度的动作,包括前滚翻、后滚翻;
(1) 步行运动的结构对称性设计思路:机身运动的对称性和腿机构的对称性之间存在相互关系。在单足支撑阶段,对称性的机身运动要求腿部机构也是对称的;在双足支撑阶段,机身对称性运动未必需要腿部机构的对称性,除非有额外的约束条件。根据这一点,我们在结构设计时也采用对称性布置;
(2)框架设计思路:有效地利用舵机的尺寸大小,减小机器人的体积、减轻重量,并使舵机的活动范围能尽量符合各关节的活动范围;
(3)关节设计思路:拟采用多关节型结构;
(4)整个结构设计思路:拟采用1.2mm的钢板材料,增加运动的稳定性。
4.整体设计
无论是交叉足还是竞步机器人,其工作原理都相同,即通过软件实现对硬件电路的控制,实现竞步机器人每个关节处的舵机转过相对应的角度。从而进行行走和做出一些基本动作。
4.1结构设计
设计交叉(狭窄)足机器人采用1.2mm厚的拉丝不锈钢板构成,结构尺寸由舵机尺寸,以及需要完成动作,初步确定设计机器人的模型;
运用AutoCAD画出零件尺寸图,手工试制,确定具体尺寸,修改AutoCAD零件尺寸图;按照修改后的尺寸图用激光切割机切割板材制作零件,使用折板机把需要折弯的零件进行加工;如图4-1为使用AutoCAD设计画出的竞步机器人零部件图,并通过UG软件画出三维部件图,如图4-2为使用UG画出的关节零部件。
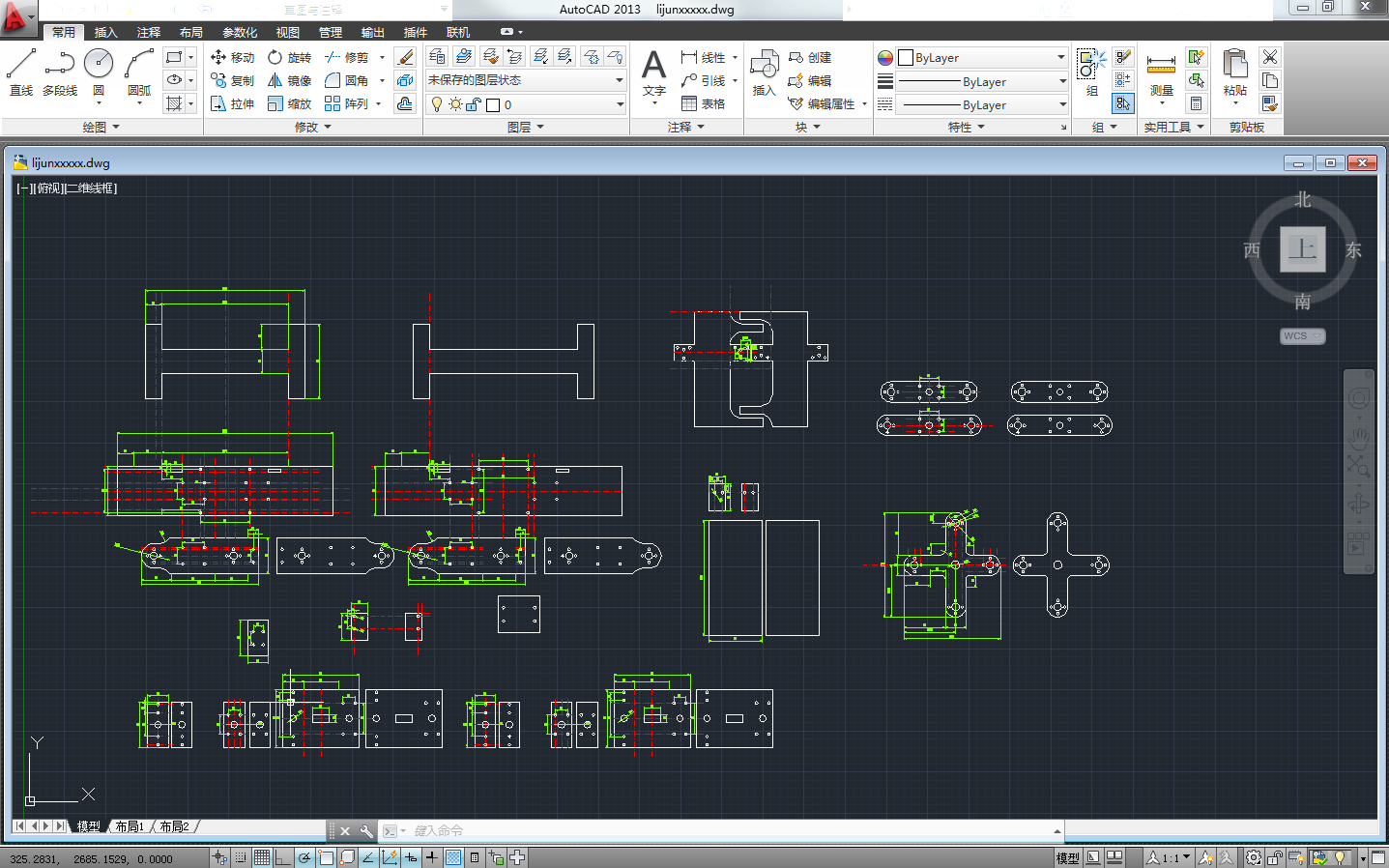
图4-1AutoCAD设计竞步机器人零部件
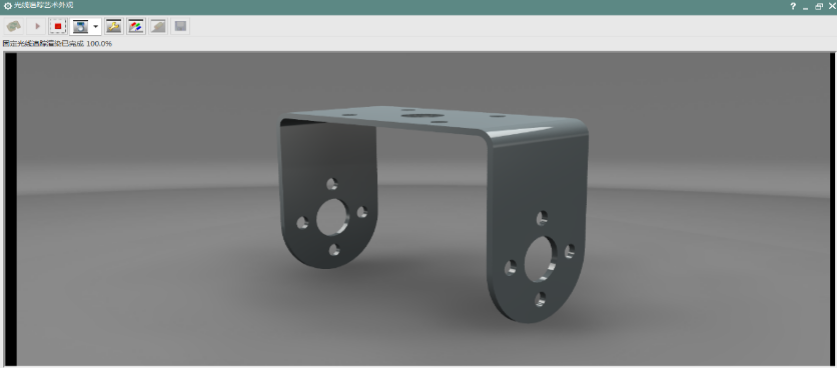
图4-2 UG绘制的竞步机器
4.2硬件电路设计
在竞步机器人的驱动装置选择中,选择的舵机型号为SR403P,该种舵机的特性如下 :
产品重量:67g(2.37盎司) 线:30CM;
工作速度:0.21 sec/60(6.0V),0.19 sec/60(7.4V);
失速扭矩:12.2公斤厘米,169.7扭力 (6.0V);13.6公斤厘米,189.2扭力的(7.4V);
旋转角度:180机器人伺服,塑料齿轮,单球轴承,旋转范围range180;
PWM码控制,180度转动范围(0.5--2.5ms)并行连接,双侧接口,圆形输出轴,使用电压7.4V。
舵机的工作原理为:舵机上有一个端口三个端子,其中两个为电源的VCC和GND,即提供舵机转动的动力电源,还有一个端子为舵机提供数字信号,使得舵机相应的角度,控制舵机的转动。该舵机只认数字信号,而舵机内部通过多级的齿轮减速器,将内部电机的高转速低扭矩转化成低转速高扭矩。所以舵机的扭力一般都很大。
舵机的控制信号为PWM信号,通过改变脉冲的占空比而改变舵机转动的角度,PWM的脉宽在0.5ms-2.5ms时,对应舵机在0度-180度区间转动,并呈线性关系。为了精准确定调整舵机所转过的角度能控制六个舵机的PWM,我们选用了有8k内存的16位飞思卡尔单片机。利用该单片机定时器仿真PWM信号输出,为了实现方便调试竞步机器人步态规划,该单片机和设计主板上设有与pc进行串口通信的端口,通过计算机实时更改舵机角度,实现竞步机器人仿真行走。最终将搭建电路,飞思卡尔单片机,舵机等通过其对应的位置,尤其是舵机的角度位置,进行了仔细的检查之后,装入拉丝钢板框架内。
4.3软件控制
通过软件控制在设计中选择了飞思卡尔xs128单片机,该单片机的主要特点为:
(1)S12X CPU, 最高总线速度 40MHz;
(2)64KB、128KB 和 256KB 闪存选项,均带有错误校正功能(ECC);
(3)带有 ECC 的、4KB 至 8KB DataFlash,用于实现数据或程序存储;
(4)可配置 8 、10 或 12 位模数转换器(ADC),转换时间 3μ s;
(5)支持控制区域网(CAN)、本地互联网(LIN)和串行外设接口(SPI)协议模块;
(6)带有 16-位计数器的、8-通道定时器;
(7)出色的 EMC,及运行和停止省电模式。
利用飞思卡尔芯片实现了对六个舵机的分时控制编写 VC上位机软件通过串口通信对双足竞步机器人进行调试通过人体仿生学调试出机器人的步态规划实现了具体操作是在相关电脑上装入CodewarrIDE驱动,打开该软件,根据舵机的角度,输入走路所转过的角度后,将机器人断开电脑,接入7.4V直流电源。观察每个舵机是否能够按照代码设定的角度进行转动,控制结构如图4-4。
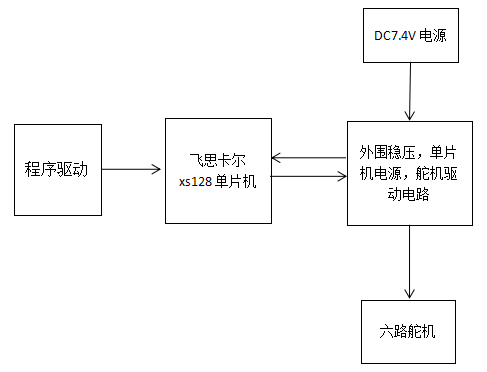
图4-4 控制结构
4.4程序调试
编程软件是CodeWarrior。CodeWarrior包括构建平台和应用所必需的所有主要工具 - IDE、编译器、调试器、编辑器、链接器、汇编程序等。它所使用的语言即为C语言。
该竞步机器人以2007年“中国机器人大赛暨国际公开赛”为目标。设定机器人的动作为:向前走五步,然后前翻三个跟头,再后翻三个跟头,立正,最终走向终点。
在完成了程序动作的编写后,将要进行竞步机器人的调试工作,在调试中,可以使用如下方法进行调试:
第一步:调试三步走程序。
第二步:调试小碎步。
第三步:调试翻跟头程序。
第四步:将前三步整理用子程序嵌套的方法,将子程序放在主程序内调用,将所有动作连贯起来。
第五步:按着自己所需要的结果,一步步调试,直至达到自己满意的结果,如果有问题,多次重复,以达到自己预期的效果。
5.项目执行情况
(1)完成框架理论设计设计,运用CAD绘制结构图,并制作。
(2)完成硬件电路设计,并实验验证设计合理。
(3)完成软件控制编程设计,实现竞步机器人行走。
(4)参与校级比赛获得一等奖以及国家级竞步机器人大赛三等奖。
(5)撰写并发表论文一篇《基于Freescale单片机控制的双足竞步机器人的设计与制作》。
6.总结
通过本次大学生创新项目,让我明白了什么是理论联系实际,通过书面学习到的知识,在组员们的努力合作中,也学会了团队合作意识对于整个项目的重要性,非常感谢我们小组的导师,费劲心血的帮助解决专业上的难题。从最初并不懂得大学生创新项目的意义何在,更不知道艰辛的路上会有这么多的收获。曾经设计机器人的过程中都遇到过很多困难,比如代码运行错误、电路板短路等,当初调试机器人的路程上,少不了通宵熬夜。一个不小心,将会导致单片机或外围电路的短路。随之而来的便是重新搭建电路,从零开始调试。
这一路上真的很感谢导师,细心的帮助我们讲解电路知识,从一个最简单的稳压回路,到最后的驱动电路,无一不是导师的辛苦与汗水。同时,给予我们提供帮助的还有相关文献书籍,在这里一并向你们表示深深感谢。
成果展示:
基于无人机遥感的伊犁天然草地草原毒害草空间格局分析
本篇内容仅供参考,凝练成一页即可
项目负责人:各**班级:地信****班
项目参加人:王**** 班级:地信****班
指导教师:余****项目编号:S2021*****024
项目简介:
建立基于无人机影像数据的白喉乌头结构参数,对基于无人机影像数据的白喉乌头结构参数进行空间格局分析。所涉及的研究内容分为三个方面:1.无人机影像获取及处理;2.白喉乌头的提取;3.空间格局分析。
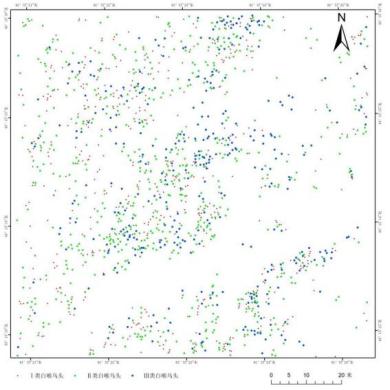
项目成果:
白喉乌头空间格局特征研究报告1部,2幅地图图件,计算机软件著作权1项。
创新点:
1.本研究验证基于小型无人机对草原毒害草参数反演具有一定的新颖性;
2.通过无人机遥感技术对白喉乌头空间分布格局进行研究,与传统方法相比具有高精度及高效率的优势,大幅度减轻了草原毒害草监测的工作量,也可以进一步证明无人机技术在草原毒害草调查中的可行性。
论文录用通知:
本篇内容仅供参考
论文见刊详情:
本篇内容仅供参考